光学系の座標について
光学系は直交座標(デカルト座標)の右手系を使用します
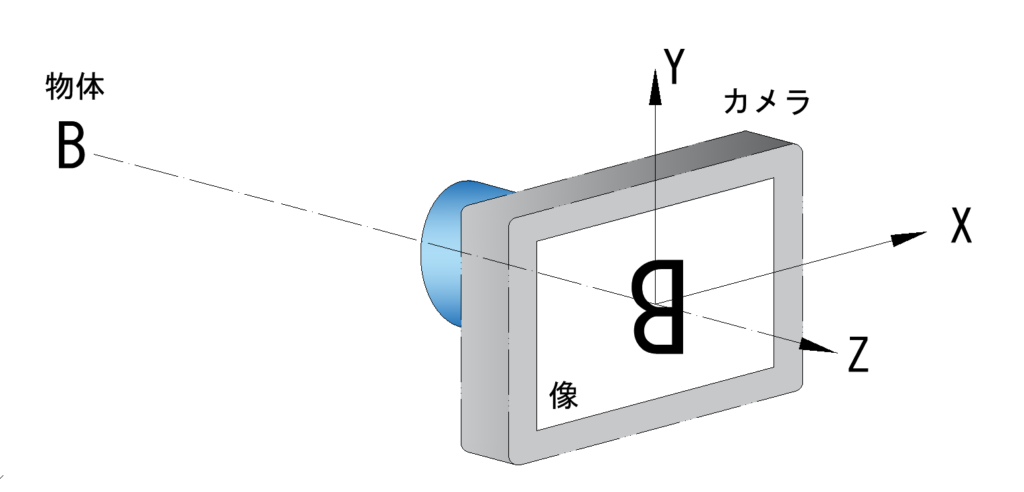
下図に物体(B)をカメラで撮影している模擬図
光線が進む方向がZ軸で、像面はXY平面(一般的に、YZ平面でレンズや結像の状態を示します)
光学系を表す基本として、物体(光源)が左側、像が右側(光線の進行方向は「左→右」の向き)
回転方向はX軸回りを [α_アルファ―] 、Y軸回りを [β_ベータ] 、Z軸回りを [γ_ガンマ」
各回転方向の符号は、時計回り(CW_Clockwise)が [+] 、反時計方向(CCW_Counterclockwise)が [-]が基本
ただ、光学ソフトにより異なります
CODEV; α(CCW_+) β(CCW_+) γ( CW_+)
ZEMAX; α( CW_+) β( CW_+) γ( CW_+)
OpTaliX; α( CW_+) β( CW_+) γ( CW_+)
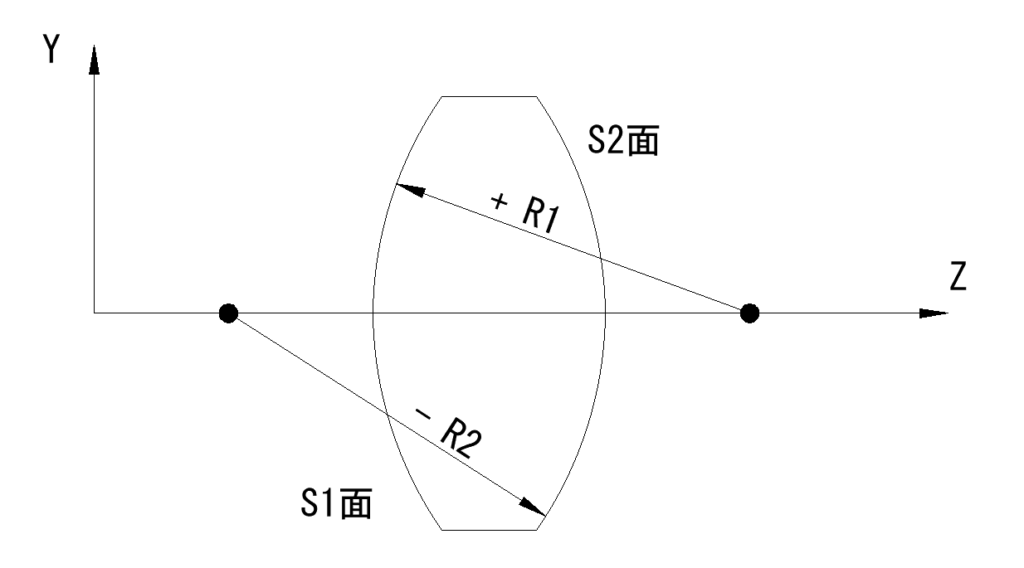
レンズの曲率半径の符号
レンズ面に対し、その曲率中心が右側にある場合が [+] 、左側にある場合が [-]
・・・シーケンシャル、ノンシーケンシャルを問わず、全ての光学ソフトにおいて共通です
※ 例えば、両凸レンズを定義する場合、第1面は [+] 、第2面は [-]
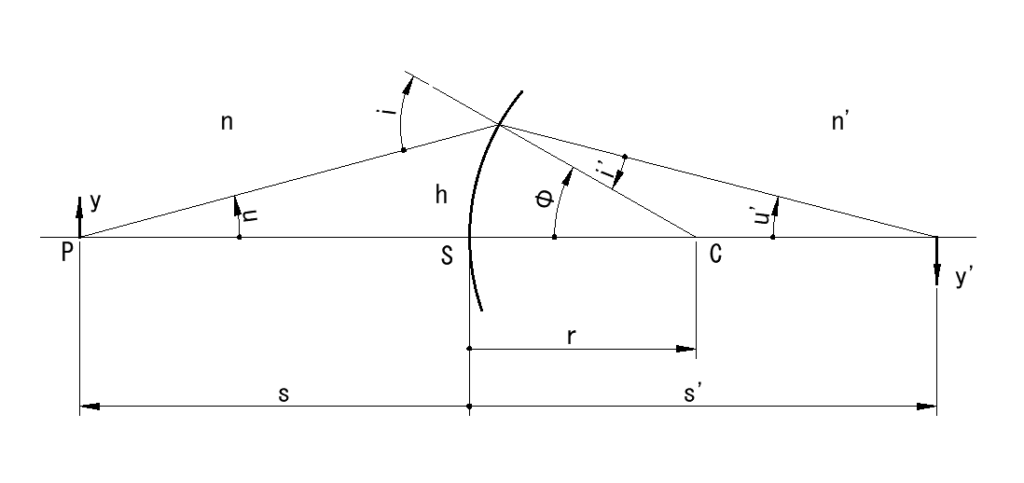
「近軸領域での結像」に関する符号
下図は近軸領域での結像を示す概念図
角度の定義は時計回りが [+] 、半時計回りが [-]
長さ(距離)方向は屈折面を基準として右側が [+] 、左側が [-] ・・・sは [-] 、s’は [+]
また、屈折面を通過した項目は [‘] を加算します
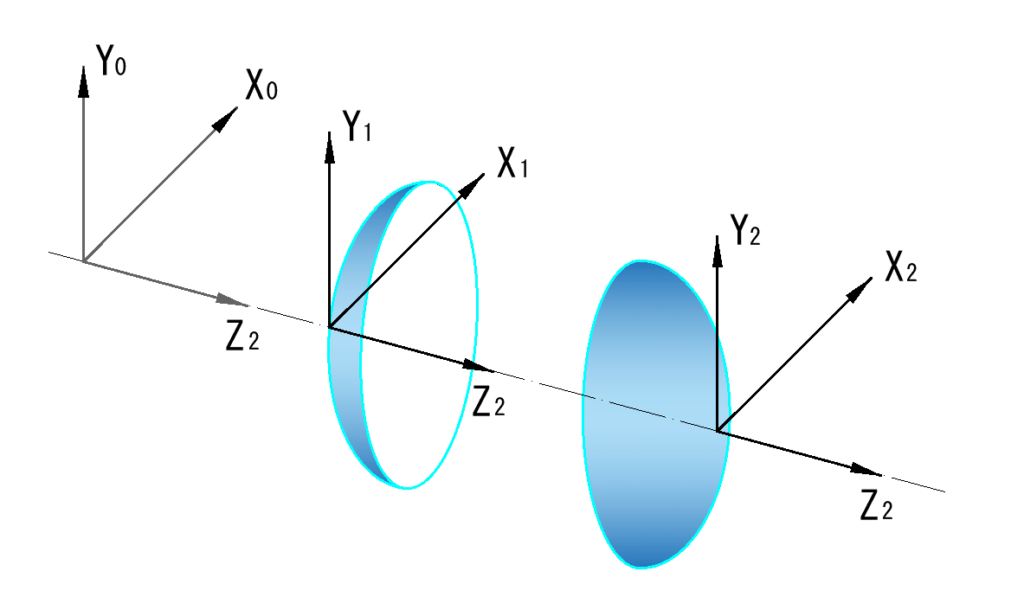
光学設計ソフトの座標系
以下参考までですが、
光学設計ソフトはカメラレンズ等の結像を扱うシーケンシャル型と、照明解析などのノンシーケンシャル型の2通りがあります
下図はシーケンシャル型の光学設計ソフトの座標の取り方を示す模擬図
物点から屈折面毎に座標を移動し、各光線の屈折角を算出する仕組みです